11. 2 .1 外部通訊 l硬件接口:RJ45、Wi-Fi等接口或者相應的擴展能力; l軟件協議:CANOpen/Et...
2019-10-18

l具有Stewart正解和反解算法; l提供各種極限位姿干涉校驗與奇異性校驗數據; l平臺位移靜態定位精度不低于1mm;...
2019-10-18
由于目前主流中低端的伺服驅動器系統都不帶有扭矩輸出的接口,所以控制板在電動缸的上下兩個極限位置的控制時,必須采用磁性開關...
2019-10-18
9.1 簡介 采用德國倍福高性能雙核主站+EtherCAT高速總線+運動控制模塊+臺達A2E系列伺服驅動器。大大提高產品...
2019-10-18
8 .1 基于STM32的CANOpen主站開發 利用STM32的內部CAN模塊進行外部收發器的設計,實現CAN通信接口...
2019-10-18
6. 21 .1 ACB55x控制電纜端子和圖 科C3 對應關系_201 80923 伺服驅動器端子號 CN1 ( DB...
2019-10-18
6.1 7 .1 ACB55x控制電纜端子和安川-5/-7對應關系 伺服驅動器端子號 CN1 (SCSI-50P) AC...
2019-10-18
6.12.1 ACB55x控制電纜端子對應關系 伺服驅動器端子號 (SCSI-50P) ACB550控制板( DB15 ...
2019-10-18
6.8.1 ACB55x控制電纜端子對應關系 伺服驅動器端子號 (CN2 DB25針) ACB550控制板( DB15 ...
2019-10-18
2019-10-18
2019-10-18
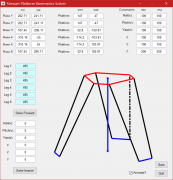
導入或手動輸入平臺的鉸接點坐標和電動缸相關參數后,程序根據內置的正解和反解算法計算出電缸的伸長量和平臺位姿數值,以及它們...
2019-10-18
將Stewart平臺鉸接點參數帶入到上述公式中,使用MATLAB求得在初始位姿下,如圖2.22.1所示,六根桿長和設計時...
2019-10-18
2019-10-18
多功能動態模擬訓練平臺配置軟件
2019-10-18
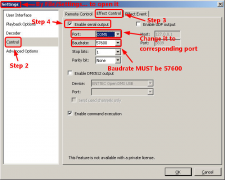
搖擺臺姿態輸出軟件( EtherCAT版)
2019-10-18
2019-10-18
注:以上兩個設置不能同時運行,只能二選一
2019-10-18
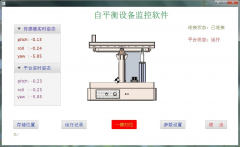
參見《南京全控自平衡控制系統V1.0說明書.docx》
2019-10-18
EFFX文件格式轉換軟件(VC版)
2019-10-18
 400 025 3599
400 025 3599 










 在線咨詢
在線咨詢 




